- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Проектирование цифрового устройства
Цифровое устройство - техническое устройство или приспособление, предназначенное для получения и обработки информации в цифровой форме, используя цифровые технологии.
Цифровые устройства делятся на 3 основных вида:
1) По способу ввода и вывода
· последовательные устройства (последовательно разряд за разрядом);
форма статистической отчетности 2 тп воздух . Верстак слесарный.· параллельные (информация снимается одновременно по всем разрядам);
· последовательно-паралельные устройства.
) По принципу действия
· Комбинационные устройства (автоматы без памяти). В них состояние выходных сигналов однозначно определяется только действующей в настоящий момент времени комбинацией входных сигналов и не зависит от значений переменных, действовавших на входах ранее. К таким устройствам относятся кодеры, декодеры, мультиплексоры, демультиплексоры, сумматоры, компараторы.
3) Последовательные или автоматы с памятью. Выходные сигналы определяются не только действующей в настоящий момент времени комбинацией входных сигналов, но и предыдущим состоянием устройства, зависимым от входных переменных, действовавших на входах ранее. К ним относятся триггеры и все устройства, построенные на триггерах: регистры, счетчики, ОЗУ, ПЗУ.
Цифровые (дискретные) автоматы (ЦА) - это логические устройства, предназначенные для приема, хранения и преобразования цифровой информации по некоторому алгоритму, способные переходить под действием входных сигналов из одного состояния в другое и выдавать выходные сигналы.
Теорию автоматов подразделяют на абстрактную и структурную. Структурная теория ЦА изучает общие приемы построения структурных схем автоматов на основе элементарных автоматов. Абстрактная теория ЦА - изучаются наиболее общие законы их поведения без учета конечной структуры (т.е. способа построения) автомата и физической природы информации.
Значение выходных сигналов такого устройства зависит не только от аргументов на входе в данный момент времени, но и от предыдущего состояния автомата, которое фиксируется элементами памяти. В качестве элементов памяти могут использоваться триггеры. Каждое внутреннее состояние цифрового автомата определяется исходным состоянием триггеров и последовательностью входных сигналов, действующих на входе в данный момент времени, поэтому такие устройства последовательного типа. К последовательным схемам можно отнести - триггеры, счетчики, регистры.
В общем случае структурная схема цифрового автомата может быть представлена в виде набора трех узлов - комбинационной схемы формирования выходных сигналов, комбинационной схемы формирования сигналов управления триггерами и, собственно, памяти (рис. 1).
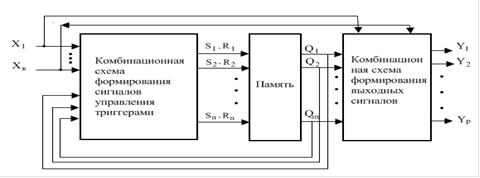
Рисунок 1. Структурная схема цифрового автомата
На вход комбинационной схемы управления триггерами поступает комбинации входных сигналов х1, х2, …, хk, комбинации сигналов, отражающих состояние элементов памяти Q1, Q2, …, Qm. С учетом этих множеств комбинационная схема формирует серии сигналов, управляющих состоянием триггеров. Кодовые комбинации состояния триггеров образуют внутренние состояние цифрового автомата, которые принято обозначать буквой а.
Комбинационная схема формирования выходных сигналов создает сигналы у1, у2, …, ур, которые могут использоваться для управления некоторыми узлами, для активации процессов в других схемах. Эти сигналы могут зависеть только от внутренних состояний: в этом случае устройство принято называть автоматом Мура. А если выходные сигналы зависят и от входных сигналов х1, х2, …, хk, то - автоматом Мили. Таким образом. Для задания цифрового автомата необходимы три множества:
· множество входных сигналов х1, х2, …, хk ;
· множество выходных сигналов у1, у2, …, ур ;
· множество внутренних состояний а1, а2, …, аz .
На указанных трех множествах задают две функции - функцию переходов f, определяющую состояние автомата а(t+1) в момент t+1 в зависимости от состояния автомата а(t) и значения входного сигнала х(t) в момент времени t: а(t+1) = f (a(t), x(t)) и функцию выходов φ, которая определяет зависимость выходного сигнала автомата у(t) от состояния автомата а(t) и значения входного сигнала х(t): y(t) = φ(a(t), x(t)).
Для автомата Мили эти функции имеют вид:
а(t+1) = f (a(t), x(t)) ; y(t) = φ(a(t), x(t)) ;
где а(t+1) - новое состояние цифрового автомата,(t) - предыдущее состояние автомата,(t) - выходные сигналы текущего времени,(t) - сигналы на входе в данный момент времени.
Для автомата Мура:
а(t+1) = f (a(t), x(t)) ; y(t) = φ(a(t)).
Одно из состояний автомата является начальным (состояние а0), и перед началом работы автомат всегда устанавливается в данное состояние.
Обычно последующие действия автомата задаются с помощью алгоритма. Функции автоматов Мили и Мура используют 2 способа: табличный и графический. В отличие от табличного способа, графический в виде графа функционирования, обеспечивает хорошую наглядность.
- Способы построения процессорных устройств
- Процессорное устройство со схемной логикой
- Процессорные устройства с программируемой логикой
- Факторы, влияющие на работоспособность цифрового устройства
- Риски, возникающие в процессе работы цифрового устройства. Способы исключения сбоев в работе цифрового устройства
- Разработка структурной схемы цифрового устройства
- Построение графа функционирования цифрового устройства
- Кодирование состояний
- Составление таблицы функционирования состояния цифрового устройства
- Определение функций управления триггерами и функций выходов комбинационного узла
- Разработка принципиальной электрической схемы цифрового устройства
- Расчёт периода следования тактовых импульсов и тактовой частоты
Читайте также
Разработка компьютерной сети по технологии Token Ring c STP с подключением к Интернет
Организация
компьютерных сетей:
Назначение
КС - КС используется для объединения ПК, программно-аппаратных комплексов и
связующих линий, обеспечивающих обмен информации. КС использует ...
Проектирование междугородной магистрали между г. Кемерово – г. Лениск-Кузнецкий с использованием симметричного кабеля
Наше время, в особенности последние десять лет, характеризуется бурным
развитием телекоммуникационных технологий. Наряду с появлением новых форм
передачи информации, совершенствуются тра ...
Последовательность технологических операций формирования структуры с диэлектрической изоляцией
Прежде чем начать изложение основного материала моей курсовой работы,
стоит ввести определения некоторых понятий, которые в дальнейшем будут широко
использоваться в данной работе.
Инт ...