- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Разработка микропроцессорной системы
микропроцессорный контроллер импульс генератор
Целью курсового проектирования является разработка микропроцессорной системы (МПС) управления некоторым объектом. МПС должна принимать информацию от объекта и выдавать на него управляющие воздействия, обеспечивающие поддержание объекта в определенном состоянии.
В курсовом проекте разрабатываются электрическая принципиальная схема и программа, обеспечивающая выполнение заданного алгоритма функционирования МПС.
Основой МПС является микропроцессор I82386SX. Структура этого микропроцессора, принципы его работы, система команд, в определенной степени являются универсальными и отражают общие принципы функционирования микропроцессоров. Микропроцессор I82386SX предназначен для построения микропроцессорных систем обработки цифровой информации и систем управления в различных областях техники, где не предъявляется высоких требований по быстродействию. Функционирование МПС сводится к следующей последовательности действий: получение данных от различных периферийных устройств, обработка данных и выдача результата обработки на периферийные устройства. При этом данные от периферийного устройства, подлежащие обработки могут поступать и в процессе их обработки. Для выполнения этих процессов в МПС предусматриваются следующие устройства: блок центрального процессора, выполняющий обработку информации; оперативная память, предназначенная для хранения и выдачи по запросам команд программ, определяющих работу микропроцессоров, различных данных.
Обобщенная структура МПС представлена на рисунке 1. В ее состав входят:
- микропроцессор (МП);
- генератор тактовых импульсов (ГТИ);
- системный контроллер (СК);
- шинный формирователь шины адреса (ШФ);
- контроллер прерываний (КП);
- дешифратор адреса памяти и УВВ (ДША памяти и УВВ);
- постоянное запоминающее устройство (ПЗУ);
- оперативное запоминающее устройство (ОЗУ);
- программируемый параллельный адаптер (ППА);
- программируемый интервальный таймер (ПИТ);
- пульт управления (ПУ).
МПС взаимодействует с объектом управления посредством восьмибитной шины X, четырехбитной шины Y1 и двух линий Y2 и Y3. По шине X через модуль ППА в МПС вводится информация о состоянии объекта управления. С помощью четырехразрядной шины Y1 осуществляется регулирование состояния объекта, а по линиям Y2 и Y3 через ПИТ на объект управления выдаются воздействия.
На ПУ с помощью тумблеров задается требуемое значение, которое выдается на МПС через восьмибитную шину «К». Информация о процессе регулирования передается с МПС через ППА на четырехразрядный светодиодный индикатор ПУ.
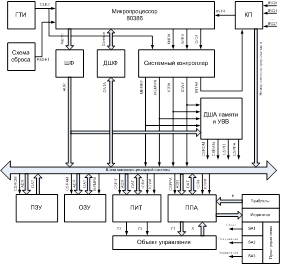
Рисунок 1 - Структурная схема МПС
Выходные воздействия Y1, Y2, Y3 и показания индикатора вырабатываются МПС после программного вычисления результатов соответствующих функций от переменных X и K, где X - 8-битовая переменная, формируемая объектом управления; K - 8-битовая константа, установленная переключателями на ПУ.
- Микропроцессор
- Генератор тактовых импульсов
- Системный контроллер
- Шинный формирователь шины адреса
- Контроллер прерываний
- Дешифратор адреса памяти и УВВ
- Оперативное запоминающее устройство
- Программируемый параллельный адаптер
- Пульт управления (ПУ)
- Синтез и описание электрической принципиальной схемы
- Карта распределения адресного пространства памяти
- Карта распределения адресного пространства устройств ввода-вывода
- Оценки
- Описание реализуемой программы на языке ассемблера
Читайте также
Проектирование и разработка интернет-магазина Компьютерная техника
Разработка
сайтов для компаний является актуальной и востребованной сферой деятельности,
т.к. сайт фирмы в сети Интернет представляет собой достаточно дешевый и
массовый способ рекл ...
Оборудование станции Круговец линейным комплектом ДЦ Неман
На современном этапе развития железнодорожного транспорта все более
значимую роль занимают системы с применением микропроцессорной техники. В
настоящее время разрабатываются и вводятся в ...
Проект внутризоновой ВОЛП на участке Новосибирск—Карасук
Научно-технический
прогресс во многом определяется скоростью передачи информации и ее объемом.
Возможность резкого увеличения объемов передаваемой информации наиболее полно
реализуется ...