- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Проектирование системы автоматического управления очистки стекла спортивного самолета
Задачи по управлению тем или иным явлением или процессом, возникающие в повседневной практической деятельности человека обширны и многообразны.
Управление можно определить как совокупность действий, обеспечивающих проведение любого процесса в целях достижения определенных результатов.
Все процессы в управлении носят общие закономерности, не зависящие от конкретных целей и объектов управления. Элементы САУ связаны друг с другом посредством передаваемых сигналов. Состояние объекта в каждый момент времени характеризуется его выходными параметрами. Управлять объектом - значит управлять его выходными параметрами. Характер преобразования сигналов в объекте и сами эти сигналы предопределены назначением объекта в технологическом процессе и не могут быть изменены. Это следует учитывать при проектировании САУ, хотя для рассмотрения ее свойств и качества природа сигналов не принципиальна.
Системы автоматического управления создаются для того, чтобы автоматически, без непосредственного участия человека поддерживать необходимый режим работы различных обслуживаемых этими автоматами объектов. Системы автоматического управления самостоятельно, без вмешательства извне либо поддерживают постоянной, либо изменяют по заранее заданному закону одну или несколько физических величин, характеризующих процессы, происходящие в обслуживаемых объектах, или же сами определяют в зависимости от ряда условий нужный или оптимальный закон управления объектом.
Целью данной курсовой работы является проектирование САУ очистки стекла спортивного самолета.
В процессе полета на самолет действуют различные внешние воздействия. В частности самолет может попасть в зону дождя или в зону пониженной температуры. Для решения данной проблемы применяют системы очистки стекла, которая за некоторый промежуток времени очистит стекло самолета от атмосферных осадков.
Спроектировать САУ очистки стекла спортивного самолета со следующими параметрами:
. Рабочий момент двигателя Мраб = 135 - 160 кгс-см ;
. Перерегулирование σ < 30 %;
. Время регулирования tp = 10 c;
. Запас по усилению ∆L > 20 дБ;
. Запас по фазе ψ > 30o.
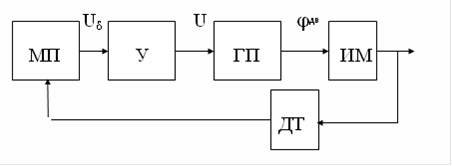
Рисунок 1 - Структурная схема САУ
МП - микропроцессор;
У - усилитель;
ГП - гидропривод;
ИМ -исполнительный механизм;
ДТ - датчик температуры.
Рассмотрим структурную схему САУ - рисунок 1, она представляет собой схему с подчиненным регулированием координат, в ней регулирование каждой координаты осуществляется регулятором температуры, который образует замкнутый контур.
Задающий сигнал Uб поступает с микропроцессора (МП) на усилитель (У), который усиливает сигнал и передает его на гидропривод. Гидропривод (ГП), преобразуюет входной электрический управляющий сигнал U, в выходную механическую величину - угловую скорость jдв щеток (ИМ).Щетки являются рабочим органом .Датчик температуры (ДТ) преобразует температуру на выходе системы в электрический сигнал UЗ
- Микропроцессор К1813ВЕ1
- Гидропривод ПС 5
- Датчик температуры CO-3M-01
- Деление ЛСУ на изменяемую и неизменяемую части. определение устойчивости
- Построение ЛАЧX
- Построение ЖЛАЧХ
- Синтез последовательного корректирующего устройства
- Выбор корректирующего устройства
Читайте также
Модуль дистанционного запуска двигателя автомобиля
Назначение устройства - производить запуск
двигателя с помощью SMS сообщения.
Курсовая работа состоит из 5 частей:
В первой части работы на основе технического
задания описывается ...
Разработка лабораторного стенда Измерение опасных акустических сигналов
Для
человека слух является вторым по информативности после зрения. Поэтому одним из
довольно распространенных каналов утечки информации является акустический
канал. В акустическом канал ...
Разработка компьютерных аналогов схем исследования биполярных транзисторов
компьютерный программа полупроводниковый моделирование
В
данной работе исследуются возможности применения компьютерного моделирования
для изучения характеристик традиционных полупроводник ...