- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Синтез последовательного корректирующего устройства
Задача синтеза, возникающая при проектировании системы автоматического регулирования, заключается в таком выборе структурной схемы системы и технических средств ее реализации, при котором обеспечиваются требуемые динамические и эксплуатационные свойства всей системы в целом.
Для нашей системы определяющим параметром является быстродействие Передаточная функция необходимого КУ была найдена на предыдущем этапе, теперь требуется определить структурную схему КУ, его элементную базу и параметры необходимых элементов.
Для реализации выбираем последовательное корректирующее устройство, так как его наиболее просто реализовать;
=GW/Wraz(28)
 (29)
(29)
При таком виде ЛАЧХ КУ по справочнику находим вид КУ. Получаем, что при таком виде ЛАЧХ корректирующего устройства, желаемую передаточную функцию корректирующего звена можно реализовать двумя одинаковыми дифференцирующими четренцирующими четс разделительным усилителем изобразим его схему на рисунке 9.
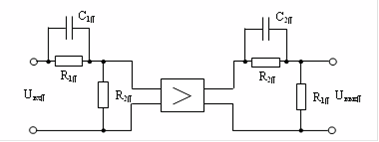
Рисунок 9 -Схема корректирующего устройства
Передаточная функция дифференцирующего четырехполюсника:
 ;(30) T1=R1∙C1= 0.0173; 2=KK1∙T1=0.0029. KK1=R2/(R1+R2)=0.16;
;(30) T1=R1∙C1= 0.0173; 2=KK1∙T1=0.0029. KK1=R2/(R1+R2)=0.16;
При этом усилитель должен иметь коэффициент усиления:
![]() (31)
(31)
.2 Синтез программного корректирующего устройства
Разработаем последовательное дискретное корректирующее устройство:
Перейдем к дискретной передаточной функции:
Wkdis=c2d(Wk,0.01)
Wkdis=![]() (32)
(32)
 (33)
(33)
Домножим числитель и знаменатель на 1/z2, тогда:
 (34)
(34)
Запишем разностное уравнение в реальном масштабе времени:
![]()
Расчет разностного уравнения
; x - входной сигнал
; y- выходной сигнал_port EQU 1lh; номер порта для чтения_port EQU 12h; номер порта для записи
Al EQU 1.5118;
А2 EQU 2.102;
А3 EQU 1.6347;
А4 EQU 1.627;
B1 EQU 4.1343;EQU 2.6894;EQU 4.3111;, x2, x3 DB 0
;выделение памяти под переменные x(k-l), x(k-2), x(k-3)
yl,y2, y3, DB 0
; выделение памяти под переменные y(k-l), y(k-2)
; вычисляем значение выражения(k)=Al*х1+А2*х2+А3*х3+В1*у1+В2*у2+В3*у3: ;метка начала цикла коррекцииal, i_port; чтение данных из портаal,Al; вычисление слагаемого А1*х1bl, al; сохранение результата в bl
; в результате имеем А1*х1 в регистре blal, X2; вычислениеal, А2; слагаемого А2*х2bl, al; прибавление к предыдущему результату
; в результате имеем А1*х1+А2*х2 в регистре blal, X3; вычислениеal, А3; слагаемого А3*х3bl, al; прибавление к предыдущему результату
; в результате имеем А1*х1+А2*х2+А3*х3 в регистре blal, yl; вычислениеal, Bl; слагаемого Bl*ylbl, al; прибавление к предыдущему результатуal, y2; вычислениеal, B2; слагаемого В2*у2bl, al; прибавление к предыдущему результату
; в регистре bl имеем результат вычисления всего выраженияy3, y2; для следующего такта
mov y2, y1; yl, blx2, xl;xl, x;
out o_port, bl; вывод управляющего сигнала из blstart; зацикливание на начало программы
Читайте также
Применение МПК в системах передачи информации
Каждое из трех предшествующих столетий ознаменовалось появлением какой-то
технологии, развитие которой определяло прогресс в этом столетии. 18 век -
механические системы, 19 - паровые ма ...
Проектирование передатчика телевизионной системы на печатной плате
Телевизионный передатчик: совокупность специализированных технических
средств, применяемых в процессе телевещания (кроме источника сигнала и его
тракта, источника электропитания и энерго ...
Проектирование радиовещательного приемника
Теория и техника радиоприемника быстро совершенствуется. Это требует от
специалистов постоянного изучения современной техники. Развитие радиоприемной
аппаратуры характеризуется в осн ...