- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Обнаружение полностью известного (детерминированного) сигнала
Если: ![]() - сигнала нет (S=0);
- сигнала нет (S=0);
![]() - сигнал есть (S
- сигнал есть (S![]() ).
).
![]() - не знаю, продолжаю наблюдение.
- не знаю, продолжаю наблюдение.
Эти соотношения можно рассмотреть на следующем рисунке:
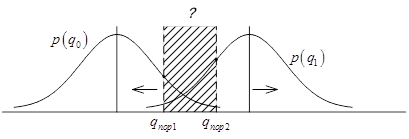
Рисунок 4
Оптимальное значение порогов определяется приближенными соотношениями между ординатами кривых ![]() и
и ![]() :
:
![]() - соответствует:
- соответствует:  ;
;
![]() - соответствует:
- соответствует:  .
.
Для ситуаций, когда критерий последовательного обнаружения наиболее эффективен, суммарное время наблюдения или энергопотенциал радиолинии оказываются много меньшими, чем при фиксированном и одинаковом времени наблюдения при каждом шаге. Это особенно важно для радиосистем углового обзора, При большом отношении вектора обзора к угловому сечению радиолуча (ширина ДН), что соответствует большему числу элементов разрешения, в каждом из которых надо принять решение о наличии или отсутствии сигнала. Время нахождения луча на данном направлении и число сигналов (принимаемых и излучаемых) зависит от результатов наблюдения и для наблюдения случайно. Такая процедура носит название метод динамического программирования образа. Т.е, если ![]() , луч антенны находится в данном направлении до тех пор, пока не будет пересечен один из порогов.
, луч антенны находится в данном направлении до тех пор, пока не будет пересечен один из порогов.
Метод динамического программирования применяется в системах обзора безинерционных антенн (с электрическим сканированием), а так же может применяться при поиске цели автодальномером.
Характеристики обнаружения
В ходе проектирования радиосистемы, и, в частности, при определении ее предельной дальности действия, необходимо определять превышение уровня сигнала над уровнем шума
 ,
,
которое при заданной вероятности ложной тревоги обеспечивает требуемую вероятность правильного обнаружения, а также решать обратную задачу. Для этой цели применительно к критерию Неймана-Пирсона были рассчитаны характеристики обнаружения. Это семейство зависимостей ![]() при различных значениях
при различных значениях ![]() (вероятность ложной тревоги). В результате вычисления интегралов, получим:
(вероятность ложной тревоги). В результате вычисления интегралов, получим:
 ;
;
 ;
;
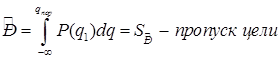
Было получено семейство кривых, приведенных на рисунке:
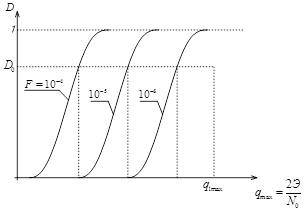
Рисунок 5
Для любой заданной вероятности обнаружения ![]() необходимое превышение
необходимое превышение ![]() может быть определено, если задана вероятность ложной тревоги.
может быть определено, если задана вероятность ложной тревоги.
Рисунок 6
Структура оптимального обнаружителя
Оптимальный обнаружитель должен сформировать корреляционный интеграл:
 ;
;
и сравнить его с порогом, который соответствует структурной схеме обнаружителя:
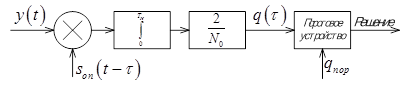
Рисунок 7
Здесь ![]() - формируемый в приемнике опорный сигнал, подобный принимаемому. Такой обнаружитель получил название корреляционный приемник.
- формируемый в приемнике опорный сигнал, подобный принимаемому. Такой обнаружитель получил название корреляционный приемник.
Данная структура приемника остается оптимальной для любого из рассмотренных критериев. Различаются только число и уровни порогов.
Оценим отношение сигнал/шум на выходе такого приемника. В общем случае входное воздействие и корреляционный интеграл определяется соотношениями: ![]() и
и
 .
.
Где:
![]() - опорный сигнал, совпадающий по форме с принимаемым (с учетом доплеровского сдвига частоты);
- опорный сигнал, совпадающий по форме с принимаемым (с учетом доплеровского сдвига частоты);
![]() - задержка опорного и принимаемого сигналов соответственно;
- задержка опорного и принимаемого сигналов соответственно;
Читайте также
Оптоэлектронные технологии
Оптоэлектроника
- бурно развивающаяся область науки и техники. Многие ее достижения вошли в
быт: индикаторы, дисплеи, лазерные видеопроигрыватели. Разрабатывается
твердоте ...
Организация сети местной телефонной связи
Для планирования работы транспорта, оперативного
управления перевозочным процессом и предупреждения потерь создают системы
передачи информационных потоков, основное требование к которым ...
Разработка микропроцессорного контроллера для контроля ритма дыхания больного
В последнее время микропроцессорные средства
вычислительной технике стало широко применяться в приборах бытовой техники,
различных контрольно-измерительных устройствах, системах управлен ...