- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Обнаружение полностью известного (детерминированного) сигнала
Рассмотрим задачу оптимального обнаружения сигнала S(t). Точно известно с плотностью вероятностей P(s) при наличии аддитивного гауссовского шума, входное воздействие:
![]() .
.
Распределение ![]() также нормальное и может быть получено простой подстановкой
также нормальное и может быть получено простой подстановкой ![]() в выражение для нормального распределения шума
в выражение для нормального распределения шума ![]() .
.
Будем считать цель точной и амплитуда сигнала на входе приемника известна. Если амплитуда неизвестна, то после приема необходимо провести дополнительную операцию усреднения полученных результатов по всем значениям амплитуды с учетом их вероятностей.
Полагаем, что амплитуда сигнала от момента излучения до момента приема не изменяется и равна ![]() . Отраженный сигнал запаздывает на время
. Отраженный сигнал запаздывает на время ![]() , т.е. можно записать:
, т.е. можно записать: ![]() . Этот сигнал существует на входе приемника в течение времени Т. Будем полагать, что дальность до цели известна. Тогда, зная функцию
. Этот сигнал существует на входе приемника в течение времени Т. Будем полагать, что дальность до цели известна. Тогда, зная функцию![]() и, придав ей некоторый сдвиг
и, придав ей некоторый сдвиг ![]() , можно образовать разность
, можно образовать разность ![]() , которая является чистым шумом при условии, что временной сдвиг
, которая является чистым шумом при условии, что временной сдвиг ![]() функции
функции ![]() равен известному времени запаздывания
равен известному времени запаздывания ![]() .
.
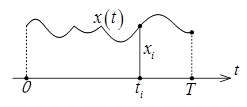
Рисунок 1
Выберем одно из значений принимаемого сигнала ![]() в произвольный момент времени
в произвольный момент времени ![]() .
. ![]() . Разность
. Разность ![]() подчиняется нормальному закону распределения:
подчиняется нормальному закону распределения:
 ;
;
Обычно сигнал вместе с шумом ограничен по полосе частот от 0 до ![]() . Тогда, согласно теории отсчетов Котельникова, функция
. Тогда, согласно теории отсчетов Котельникова, функция ![]() на интервале
на интервале ![]() однозначно определяется
однозначно определяется ![]() своими значениями
своими значениями ![]() , которые отсчитываются через интервалы времени
, которые отсчитываются через интервалы времени  , и которые являются независимыми величинами. Применим теорему умножения вероятностей для независимых и совместных событий:
, и которые являются независимыми величинами. Применим теорему умножения вероятностей для независимых и совместных событий:
![]() , получим:
, получим:
 .
.
Переходя от дискретного представления к непрерывному, и заменяя сумму интегралом, получим:
 , где:
, где:
 , и
, и ![]() - функция правдоподобия.
- функция правдоподобия.
Для нахождения отношения правдоподобия необходимо найти ![]() , т.е. условную вероятность сигнала
, т.е. условную вероятность сигнала ![]() в отсутствии цели. Это можно получить, подставляя в полученное выражение
в отсутствии цели. Это можно получить, подставляя в полученное выражение ![]() , т.е.
, т.е.
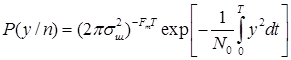 .
.
Найдем отношение правдоподобия:
 ;
;
В этом выражении: 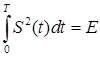 - энергия входного сигнала,
- энергия входного сигнала,
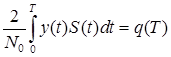 - корреляционный интеграл.
- корреляционный интеграл.
Итак:  .
.
Для вынесения решения необходимо сравнить ![]() с порогом
с порогом ![]() . Если:
. Если:
![]() - сигнал есть,
- сигнал есть, ![]() - сигнала нет.
- сигнала нет.
С учетом того, что в общем случае между![]() и
и ![]() может существовать временной сдвиг, развернутое выражение для корреляционного интеграла имеет вид:
может существовать временной сдвиг, развернутое выражение для корреляционного интеграла имеет вид:
Читайте также
Проект устройства со световыми эффектами на основе микроконтроллера ATtiny12 семейства AVR фирмы Atmel
Популярность микроконтроллеров ATtiny постоянно увеличивается.
Не последнюю роль в этом играет соотношение показателей «цена/ быстродействие/
энергопотребление», являющееся одним из ...
Проектирование устройств фильтрации
Неотъемлемая часть телекоммуникационных задач связана с преобразованием
сигналов. Одной из основных является фильтрация, т.е. выделение или подавление
определенных частот сигнала. Устрой ...
Модуль дистанционного запуска двигателя автомобиля
Назначение устройства - производить запуск
двигателя с помощью SMS сообщения.
Курсовая работа состоит из 5 частей:
В первой части работы на основе технического
задания описывается ...