- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Показатели качества работы САР
Устойчивость является необходимым, но недостаточным условием работоспособной системы, поскольку она (САР) должна отвечать дополнительным требованиям в статике и динамике для обеспечения хорошего функционирования, т.е. качественной работы. Под качеством САР понимают совокупность требований, прямо или косвенно характеризующих точность ее работы. Картинки по запросу фитинги для труб пнд латунные.
Требования в статике ориентированы на точность работы САР в установившихся режимах. При этом обычно необходимо, чтобы установившаяся ошибка САР eуст не превышала заданных допустимых значений.
При анализе динамики САР предъявляются вполне определенные требования по отработке либо наиболее характерных управляющих воздействий, либо наиболее неблагоприятных. К числу неблагоприятных воздействий часто относят скачкообразное воздействие ![]() . Поскольку мы рассматриваем линейные системы, то изменение величины скачка K влияет только лишь на изменение масштаба по оси ординат, а перерегулирование s, время первого согласования tc, время достижения переходным процессом максимального значения tm, а также время регулирования tp при этом остаются неизменными. Поэтому в качестве скачкообразного воздействия часто принимают единичную функцию Хевисайда
. Поскольку мы рассматриваем линейные системы, то изменение величины скачка K влияет только лишь на изменение масштаба по оси ординат, а перерегулирование s, время первого согласования tc, время достижения переходным процессом максимального значения tm, а также время регулирования tp при этом остаются неизменными. Поэтому в качестве скачкообразного воздействия часто принимают единичную функцию Хевисайда ![]() .
.
Нам уже известно, что реакцию САР на единичное воздействие ![]() называют переходной функцией
называют переходной функцией ![]() . Следовательно, оценку качества работы САР можно осуществлять по переходной функции.
. Следовательно, оценку качества работы САР можно осуществлять по переходной функции.
Разделим задачу оценки качества работы САР на две подзадачи:
1) Оценка точности работы САР в установившихся режимах;
2) Анализ качества переходных процессов в САР.
Оценка точности работы САР в установившихся режимах. Коэффициенты ошибок
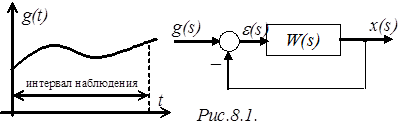
При рассмотрении вопросов точности будем считать, что на систему с единичной отрицательной обратной связью действует управляющее воздействие, которое изменяется достаточно плавно при больших временах наблюдения (рис.8.1), т.е. так, что существенное значение имеют только первые l производных от ![]() -
-
![]() ,
, ![]() , …,
, …, ![]() ,
,
а остальные, высшие производные ![]() могут быть приняты равными нулю.
могут быть приняты равными нулю.
Наиболее полной характеристикой качества системы в установившемся режиме является установившаяся ошибка. Найдем ПФ САР по ошибке:
 .
.
Разложим ![]() в ряд Маклорена, сходящийся при малых s (т.е. при больших временах t):
в ряд Маклорена, сходящийся при малых s (т.е. при больших временах t):
![]() ,(1)
,(1)
где коэффициенты ряда c0, c1, c2, … определяются по уравнению [1]:
 ,(2)
,(2)
где значению i=0 соответствует отсутствие дифференцирования.
Действительно, из (1) с помощью (2) можно получить:
![]() ;
;
 ;
;
Ограничиваясь в (1) первыми l+1 слагаемыми (т.е. пренебрегая производными порядка выше l-го), для изображения ошибки запишем выражение:
 ,
,
или, переходя к оригиналам:
![]() .(3)
.(3)
Коэффициенты c0, c1, …, cl называются коэффициентами ошибок.
Коэффициенты ошибок определяют долевое участие в общей ошибке самого сигнала (c0) и l его производных (c1, c2, …, cl). Если входная ![]() и выходная
и выходная ![]() величины одной размерности, то c0 есть безразмерная величина, размерность c1 - секунда (с), размерность c2 - с2 и т.д.
величины одной размерности, то c0 есть безразмерная величина, размерность c1 - секунда (с), размерность c2 - с2 и т.д.
Первые три коэффициента ошибки, которыми часто и ограничиваются на практике, имеют специальные названия: c0 - коэффициент позиционной ошибки; c1 - коэффициент скоростной ошибки; c2 - коэффициент ошибки по ускорению.
Примечание. Только что рассмотрен случай, когда на САР действует только управляющее воздействие ![]() , поэтому, строго говоря, выше речь шла о коэффициентах ошибки по управляющему воздействию. В случае действия на САР дополнительного возмущающего воздействия
, поэтому, строго говоря, выше речь шла о коэффициентах ошибки по управляющему воздействию. В случае действия на САР дополнительного возмущающего воздействия ![]() в силу линейности рассматриваемых САР
в силу линейности рассматриваемых САР
Читайте также
Параллельное развитие аналоговой и цифровой вычислительной техники
Вычислительная техника сегодня является важнейшим компонентом процесса
вычислений и обработки данных. Основой современной научно-технической революции
является бурное развитие средств об ...
Разработка макета для исследования металлических проводниковых материалов
Автоматизация
производства процесс в развитии машинного производства, при котором часть или
весь комплекс операций по качественному преобразованию состояния исходного
сырья, управлению ...
Проектирование сетевого оборудования NGN
В настоящее время всё чаще встречаются публикации, посвящённые коренному
преобразованию ТфОП и переходу к сети следующего поколения (NGN). Она позиционируется как
универсальная сеть, спо ...