- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Критерии оптимального обнаружения
Перед тем, как находить оптимальное решение, необходимо определить критерий, согласно которому оно должно быть оптимизировано. Ввиду случайного характера анализируемых процессов, оптимум определяется не по отдельным их реализациям, а в среднем, по многим реализациям.
Рассмотрим наиболее распространенные критерии оптимальности обнаружения:
. Критерий минимума среднего риска (критерий Байеса). Выявляется полная группа всех возможных сочетаний событий и решений, т.е. в данном случае: ![]() - безусловные совместные вероятности.
- безусловные совместные вероятности.
Сумма их безусловных вероятностей:
 .
.
Далее назначается плата (риск) ![]() для ошибок каждого вида (для безошибочных решений плата равна 0):
для ошибок каждого вида (для безошибочных решений плата равна 0):
![]()
Определяется средний риск:
![]()
Безусловные вероятности ошибочных сочетаний могут быть выражены через их условные вероятности:
С учетом этого можно определить средний риск:
![]()
На основании этого соотношения определяется порог чувствительности приемного устройства, при котором ![]() минимален.
минимален.
Характерным для этого и более частного критериев является этап назначения платы для каждого вида ошибок, который является результатом не строгого логического обоснования, а волевого эвристического определения коэффициента риска на основе предшествующего опыта и инженерной интуиции разработчика.
Все другие критерии оптимального обнаружения могут рассматриваться как частные случаи критерия минимального среднего риска.
. Критерий идеального наблюдателя (критерий Котельникова)
Предполагает равенство минимальных ошибок: ![]() . При этом:
. При этом: ![]() ,
, ![]() и
и ![]() должны быть известны.
должны быть известны.
В частном случае равенства априорных вероятностей наличия и отсутствия сигнала ![]() , средний риск представляет собой среднеарифметическую ошибку:
, средний риск представляет собой среднеарифметическую ошибку:  .
.
Этот критерий чаще применяется в системах передачи информации.
. Критерий Неймана-Пирсона
Задают предельно допустимое значение вероятности ложной тревоги ![]() и при условии
и при условии ![]() определяют порог чувствительности приемного устройства, при котором обеспечивается максимальная вероятность правильного обнаружения
определяют порог чувствительности приемного устройства, при котором обеспечивается максимальная вероятность правильного обнаружения ![]() .
.
Для иллюстраций сказанного рассмотрим рисунок 3. Приведены 4 реализации случайного колебания: первые две изображают шум на выходе согласованного фильтра, а две другие - сумму сигнала и шума. При этом установлен некоторый порог приемного устройства - ![]() . Шум в первой реализации не превышает порога. Во второй реализации, хотя сигнала и нет, однако выброс шума превышает порог. В третьей реализации сумма сигнала и шума превышает порог, в четвертой - не достигает порога.
. Шум в первой реализации не превышает порога. Во второй реализации, хотя сигнала и нет, однако выброс шума превышает порог. В третьей реализации сумма сигнала и шума превышает порог, в четвертой - не достигает порога.
Из рассмотренных случаев в первом и третьем случае будет принято правильное решение, а во втором и четвертом - нет. Если взять другой порог, то ситуация может измениться.
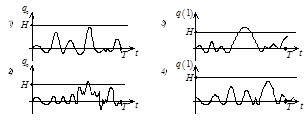
Рисунок 3
Кроме перечисленных, используются также критерии:
минимальной взвешенной вероятности ошибки;
Читайте также
Оптоэлектронные технологии
Оптоэлектроника
- бурно развивающаяся область науки и техники. Многие ее достижения вошли в
быт: индикаторы, дисплеи, лазерные видеопроигрыватели. Разрабатывается
твердоте ...
Особенности работы современного средства автоматической радиолокационной прокладки (САРП)
Устройство
компьютерной индикации, совмещенное со средствами автоматической
радиолокационной прокладки (САРП) и с электронной картографической системой,
размещаемых в ходовой рубке судн ...
Основные принципы и задачи по организации технической эксплуатации ВОЛП
Техническую
эксплуатацию линейно-кабельных сооружений магистральной и внутризоновых
первичных сетей Российской Федерации организуют Минсвязи РФ и центры
технической эксплуатации в соотв ...