- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Фазосдвигающее устройство - замкнутое интегрирующее с синхронизацией со стороны релейного элемента
ФСУ - устройство, которое предназначено для преобразования сигнала управления в фазовый сдвиг импульсов управления тиристорами относительно напряжения сети соответствующей фазы. ФСУ обеспечивает изменение или регулировку угла управления.
Классификация ФСУ:
. По принципу управления:
· С вертикальным управлением;
· С горизонтальным управлением.
В ФСУ с вертикальным управлением сигнал развертки (или входной сигнал) смещается друг относительно друга в вертикальной плоскости
В ФСУ с горизонтальным управлением сигнал развертки имеет зависимую от входного воздействия крутизну нарастающего фронта или развертывающуюся функцию смещения относительно некоторого значения в горизонтальной плоскости.
. По принципу развертывающего преобразования.
· ФСУ с выборкой мгновенных значений сигнала управления;
· интегрирующие ФСУ (могут выполняться, как по разомкнутому принципу управления, так и по замкнутому); комбинированные ФСУ.
Представленное на рисунке 3.8 ФСУ с синхронизацией по входу РЭ относится к разряду комбинированных развертывающих систем. Параметрическая развертка, формируемая внешним генератором пилообразного напряжения (ГПН), синхронизированного с сетью, выполняет роль ведущей развертывающей функции и определяет частоту вынужденных колебаний ФСУ. Скважность выходных импульсов РЭ (угол управления тиристорами) зависит от величины информационного сигнала, подаваемого на вход интегратора, и взаимодействия функциональной (ведомой) развертки с сигналом генератора пилообразного напряжения. По истечению определенного числа периода импульса выходного элемента система выходит на установившийся уровень. В установившемся режиме угол управления тиристором определяется по формуле регулировочной характеристики ФСУ:
![]() , (3.4)
, (3.4)
где ![]() - относительное значение величины входного сигнала управления.
- относительное значение величины входного сигнала управления.
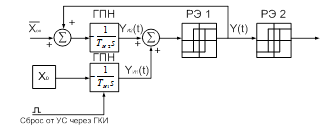
Рисунок 3.8 - Функциональная схема замкнутого интегрирующего ФСУ с синхронизацией со стороны релейного элемента
Для дальнейшего описания работы данной ФСУ стоит задаться рядом величин: ![]() В - величина внешнего генератора напряжения, проходя через ГПН, интегрированный сигнал сбрасывается от ГКИ, тем самым мы синхронизируем данный сигнал с сетью;
В - величина внешнего генератора напряжения, проходя через ГПН, интегрированный сигнал сбрасывается от ГКИ, тем самым мы синхронизируем данный сигнал с сетью; ![]() В - величина сигнала, определяющая угол управления (по формуле 4 для данного значения
В - величина сигнала, определяющая угол управления (по формуле 4 для данного значения
![]() эл.град.;
эл.град.;
![]() - постоянная времени ГПН, синхронизированного сетью, через который проходит сигнал
- постоянная времени ГПН, синхронизированного сетью, через который проходит сигнал ![]() ;
;
![]() - постоянная времени ГПН, через который проходит сигнал управления
- постоянная времени ГПН, через который проходит сигнал управления ![]() (по условию задания
(по условию задания ![]() ).
).
Сигналы ![]() и
и ![]() определяются по выражению:
определяются по выражению:
![]() (3.5)
(3.5)
Проходя через ГПН (интеграторы) сигналы ![]() и
и ![]() сигналы суммируются и идут на релейный элемент РЭ1, который замыкает обратную связь. Амплитуда релейного элемента равна
сигналы суммируются и идут на релейный элемент РЭ1, который замыкает обратную связь. Амплитуда релейного элемента равна ![]() , что и позволяет впоследствии добиться желаемого угла управления. Затем конечный сигнал проходит через РЭ2, преобразуясь тем самым в логический («1» или «0»). Временные диаграммы сигналов представленные ниже соответствуют ожидаемым, вследствие этого можно говорить о нормальном функционировании данного ФСУ [1].
, что и позволяет впоследствии добиться желаемого угла управления. Затем конечный сигнал проходит через РЭ2, преобразуясь тем самым в логический («1» или «0»). Временные диаграммы сигналов представленные ниже соответствуют ожидаемым, вследствие этого можно говорить о нормальном функционировании данного ФСУ [1].
Читайте также
Приемно-контрольная панель на базе микроконтроллера
Приемно-контрольные
приборы (ПКП) осуществляют прием информации от извещателей, ее запоминание,
обработку и передачу соответствующим службам, а также выполняют процедуры
взятия под охра ...
Применение системы автоматического проектирования на ИП Суслова
Почти
все крупные предприятия используют в своей работе возможности компьютерной
техники, в частности CAD, CAM, САЕ технологии, т.к. они предоставляют ряд
преимуществ, таких как ...
Пример записи фильма в формате DVCAM
звуковой формат
Цель данной работы показать работу в условиях записи фильма в формате
Dvcam, записи зистового звука на HD-рекордер. Были выбраны 2 рассказа А.П.
Чехова: "Кот" и ...