- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Проектирование систем защиты радиоэлектронной аппаратуры от механических воздействий
Получим:
![]() |
|![]()
![]()
Рассмотрим систему с внешним кинетическим воздействием h=H*sinωt
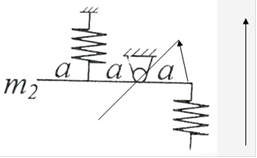
Рис.
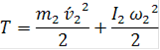
Найдем кинетическую энергию:



Потенциальная энергия такая же, как и в предыдущем случае:
![]()

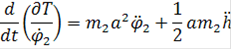
Составим уравнения Лагранжа.
![]()
С учетом того, что ![]() , получим
, получим
![]()
Общее решение однородного уравнения: Asinkt
Частное решение неоднородного уравнения ищем в виде
![]() ;
; ![]()
![]() |
|![]()
![]()
![]()
Так как элемент расположен на расстоянии r от опоры,то ![]()
По определению,![]() , и
, и ![]() . Получим
. Получим

![]()
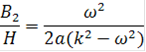
Для амортизации необходимо выполнение ![]()
Итак,
![]()
Левая часть неравенства выполняется всегда, так как она меньше 0.
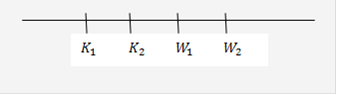
Рис.
Получим:
![]()
Эмперически ![]() . Тогда
. Тогда ![]()
В итоге, собственные частоты :
![]()
![]()
Определение жесткостей амортизаторов
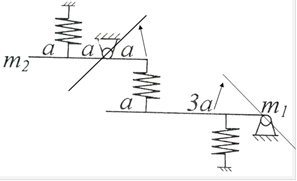
Рис.
Определим необходимые величины для составления уравнения Лагранжа.
Найдем кинетическую энергию:
![]()
Читайте также
Проект участка сети доступа по технологии PON г. Новосибирска
Современное
общество - информационное общество. Жизнь и деятельность человека неразрывно
связана с информацией, ее хранением, передачей и обработкой, Объем данных
передаваемых по канала ...
Разработка локальной сети предприятия (на материалах ОАОТ Дабрабыт)
Локальная вычислительная сеть(Local Area Network), именуемая в дальнейшем LAN, - это совокупность компьютеров и
других средств вычислительной техники (активного сетевого оборудования,
пр ...
Особенности работы современного средства автоматической радиолокационной прокладки (САРП)
Устройство
компьютерной индикации, совмещенное со средствами автоматической
радиолокационной прокладки (САРП) и с электронной картографической системой,
размещаемых в ходовой рубке судн ...