- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Построение ЖЛАЧХ
Построение ЖЛАЧХ начинаем с построения запретной зоны, геометрия которой определяется положением рабочей точки.
Абсцисса рабочей точки
 (56)
(56)
выраженная в псевдочастоте принимает значение
![]() ;
; ![]() . (57)
. (57)
Ордината рабочей точки
 (58)
(58)
Через эту точку проводим низкочастотную асимптоту с наклоном минус 20Бд/дек и высокочастотную с наклоном минус 40 дБ/дек.
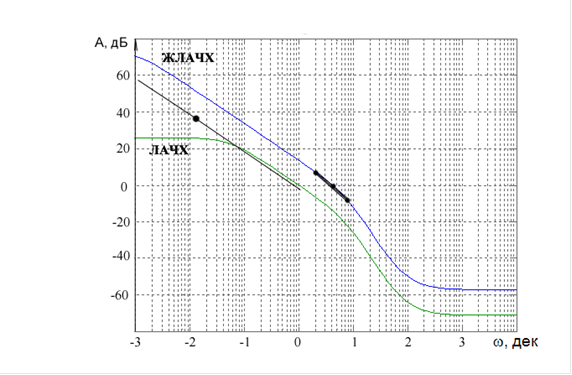
Рисунок 12 - ЛАЧХ нескорректированной системы и желаемая ЛАЧХ.
Построение среднечастотной асимптоты ЖЛАЧХ начинают с выбора частоты среза. По номограмме Солодовникова определим частоту среза используя заданное время регулирования tр и значение перерегулирования s
![]() , (59)
, (59)
![]() . (60)
. (60)
Среднечастотная асимптота ЖЛАЧХ проводится через точку lcр с наклоном - 20 дб/дек, который обеспечивает необходимый запас по фазе. Протяженность h среднечастотной асимптоты устанавливается исходя из необходимого запаса устойчивости. Из этих же соображений выбирается ее сопряжение с низкочастотной асимптотой.
Показатель колебательности M характеризует склонность системы к колебаниям.
Чем больше М, тем меньше запас устойчивости системы.
 (61)
(61)
Границы среднечастотной асимптоты
 (62)
(62)
![]() (63)
(63)
Используя полученные данные строим желаемую характеристику, обеспечивающую необходимые показатели качества системы. Через частоту среза проводится среднечастотная асимптота с наклоном - 20 дб/дек, высокочастотная часть системы мало влияет на устойчивость, поэтому ее достроим эквидистантно к высокочастотной части ЛАЧХ неизменяемой части системы.
Передаточная функция ЖЛАЧХ
 (64)
(64)
Определим запасы устойчивости скорректированной системы
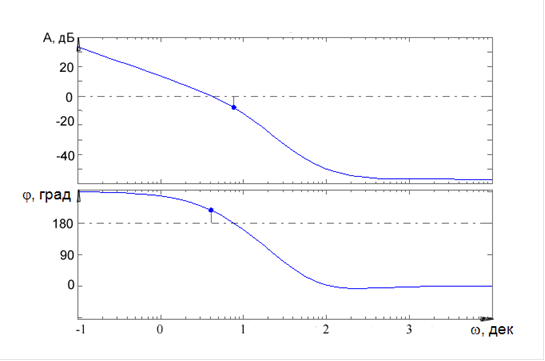
Рисунок 13 - Запасы устойчивости ЖЛАЧХ.
Запасы устойчивости: по амплитуде = 10,5 дБ, по фазе 36,4°.
Переходный процесс замкнутой скорректированной системы показан на рисунке 14.
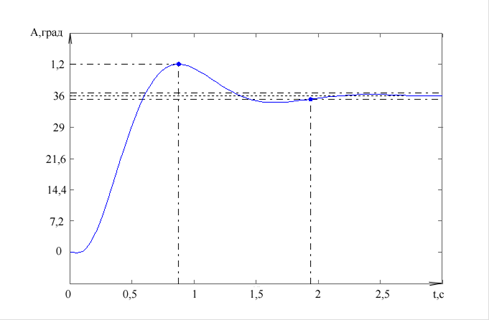
Рисунок 14 - Переходный процесс скорректированной системы.
Время регулирования 1,94 c.
Перерегулирование 19%.
Колебательность: 1.
Коррекция проведена успешно, система удовлетворяет техническому заданию.
Читайте также
Модуль шестнадцатиразрядного двоичного реверсивного счетчика с параллельно-последовательным переносом, с предустановкой и выводом информации по два разряда, начиная с младшего
В настоящее время происходит компьютеризация практически во всех областях
науки, техники, производства…Предпочтение отдается цифровым технологиям,
которые считаются более продвинутыми и ...
Разработка компьютерной сети по технологии ArcNet с подключением к Internet
Организация
компьютерных сетей.
Назначение:
Создание
компьютерных сетей вызвано практической потребностью пользователей удаленных
друг от друга компьютеров в одной и той же информ ...
Проектирование корпоративной сети
Информационная сеть - сеть, предназначенная для обработки, хранения и
передачи данных. Информационная сеть состоит из:
· абонентских и административных систем;
· связы ...