- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Моделирование нелинейных САУ с релейными алгоритмами управления
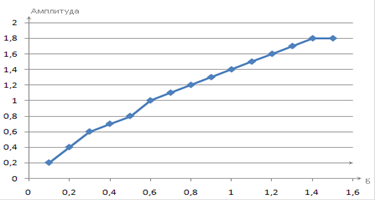
График 5 - Зависимость амплитуды от σ
σ - зона нечувствительности регулятора
По полученным данным строим графики
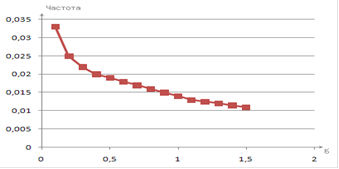
График 6 - Зависимость частоты от σ
σ - зона нечувствительности регулятора
Вывод: Построены графики для разных σ для первого варианта. Для графика найдены амплитуды и частоты переходных процессов и построены графики зависимости амплитуд и частот от σ.
Читайте также
Проектирование спутниковой линии связи между городом Якутск и поселком Черский
Стремительное развитие космонавтики, успехи в изучении и
исследовании околоземного и межпланетного космического пространства выявили
весьма высокую эффективность использования околоз ...
Приемно-контрольная панель на базе микроконтроллера
Приемно-контрольные
приборы (ПКП) осуществляют прием информации от извещателей, ее запоминание,
обработку и передачу соответствующим службам, а также выполняют процедуры
взятия под охра ...
Оптоэлектронные технологии
Оптоэлектроника
- бурно развивающаяся область науки и техники. Многие ее достижения вошли в
быт: индикаторы, дисплеи, лазерные видеопроигрыватели. Разрабатывается
твердоте ...