- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Моделирование моделей с помощью программы RPS2
В качестче эксперементов будем использовать выше упомянатую программу RPS2: Radio Planning System 2_demo, ниже перечисленные экспиременты мы будем проводить для базовой станции (БС1) местоположение которой изменяться не будет. На рис.3.6 мы видим рельефную карту города Новосибирска 2002 года. На ней нанесено несколько базовых станций.
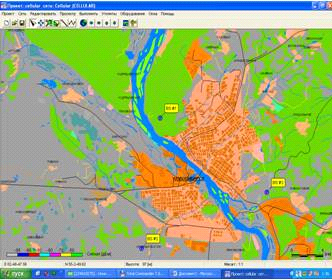
Рис.3.6 Рельефная карта города Новосибирск
Моделирование зоны прямой видимости
Произведем расчет прямой видимости базовой станции 1 (БС 1). Для этого зададим некоторые параметры. Пусть антенна находится на высоте 50 метров, мобильная станция (МС) на высоте 1,5 метра, расстояние расчета 50 км, шаг 124 м, расчет будем производить вокруг всей антенны, таким образом начальный угол зададим 0 градусов, конечный угол 360 градусов (рис 3.7-3.8).
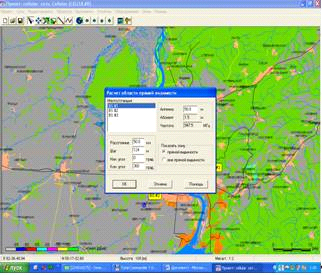
Рис.3.7 Расчет области прямой видимости
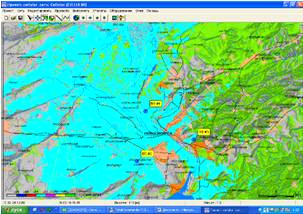
Рис 3.8 Зона прямой видимости БС 1
Теперь покажем, как влияет препятствия (здания, холмы) на зону прямой видимости. Для этого создадим искусственно препятствие не далеко от БС 1 (рис 3.9.). Далее произведем расчет при тех же параметрах, которые использовались в предыдущем примере (рис 3.10.).
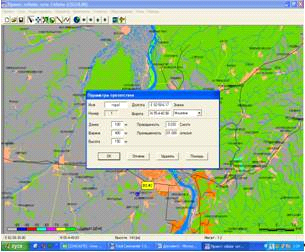
Рис.3.9 Параметры препятствия
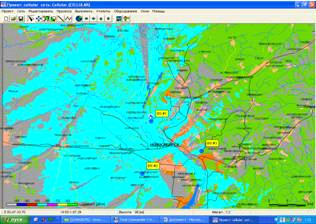
Рис 3.10. Расчет зоны прямой видимости
Моделирование модели COST231 - Walfish - Ikegami
Данная модель была описана в пункте 2.2.2. Приведем два примера расчета покрытия данной модели.
Пример №1.
Прежде чем произвести расчет покрытия, нужно определить параметры места/станции (Рис.3.11.-3.12):
расположение станции на карте (долгота, широта);
число секторов ;
настройка каждого сектора(антенны, приемопередатчика);
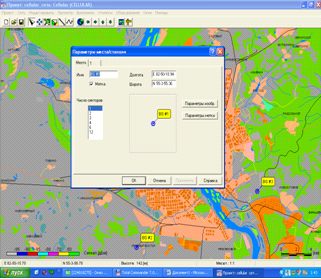
Рис.3.11. Параметры места
Исходные данные для БС 1:
число секторов 1;
высота антенны от земли составляет 50 м;
наклон антенны 0о, азимут 135о,вертикальная поляризация;
приемопередатчик: мощность 40.000 дБм, чувствительность -95.000 дБм;
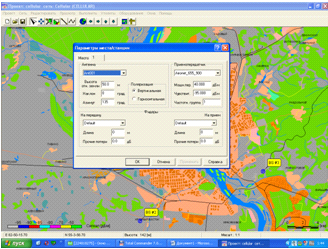
Рис.3.12.Параметры станции
После того как мы задали параметры станции мы можем произвести расчет покрытия (рис. 3.13-3.14), предварительно задав еще несколько параметров (в скобках указаны параметры которые мы выставили для расчета):
высота МС (1,5 м);
частота (947,5 МГц);
уровень крыш(15 м);
ширина улиц (20 м);
расстояние между зданиями (40м);
тип застройки (плотная);
расстояние (5 км);
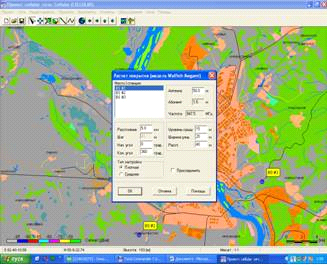
Рис 3.13 Определения дополнительных параметров
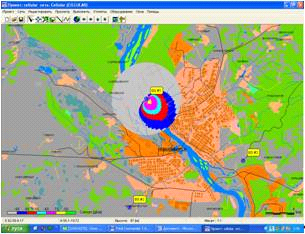
Рис. 3.14 Результат примера №6
На рис 3.14 очерчен круг радиусом 5 км, внутри этого круга различным цветом указаны уровни сигнала (самый сильный уровень зеленый, далее желтый, розовый, голубой, красный, синий и серый, который указывает на отсутствие сигнала).
Пример №2.
В этом примере мы изменим число секторов до 2 в БС 1(рис 3.15).
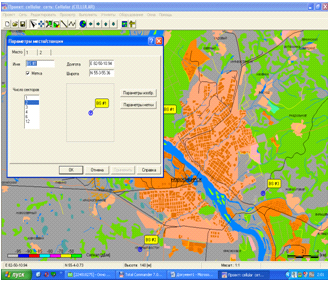
Рис 3.15 Параметры БС 1
Зададим параметры для каждого из двух секторов, такие же, как в примере №1 (рис 3.16-3.17).
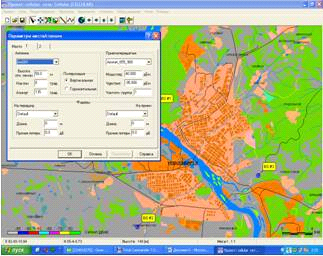
Рис 3.16 Параметры сектора 1(БС 1)
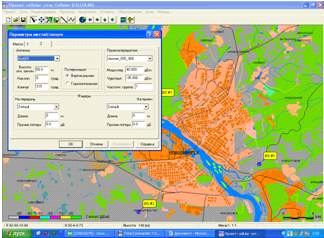
Рис 3.17 Параметры сектора 2(БС 1)
Теперь производим расчет покрытия БС 1 используя модель Walfish-Ikegami (дополнительные параметры используем такие же, как в примере №1).
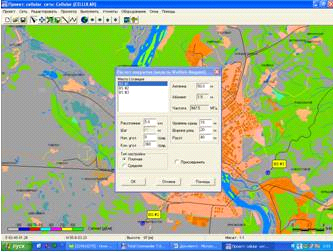
Рис 3.18 Определение дополнительных параметров
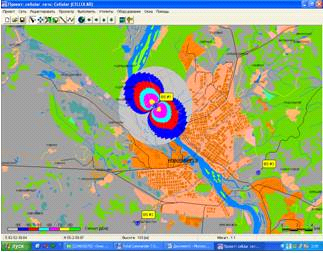
Рис 3.19 Результат примера №2
Моделирование модели COST231-Hata
Пример №3. Произведем расчет покрытия БС1 методом Hata(COST231), используя исходные параметры примеров №2 и №3 из пункта 3.4.2 (рис. 3.20-3.22).
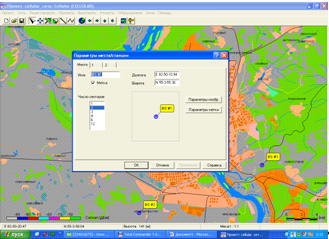
Рис 3.20 Определение параметров станции
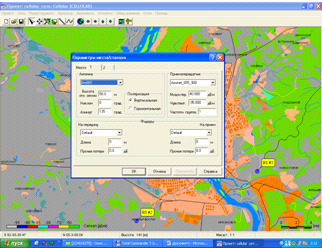
Рис 3.21 Определение параметров сектора 1
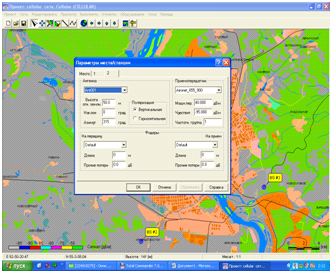
Рис 3.22 Определение параметров сектора 2
Зададим дополнительные параметры (в скобках указаны параметры которые мы выставили для расчета, рис 3.23):
высота МС (1,5 м);
частота (947,5 МГц);
уровень крыш(15 м);
Читайте также
Проектирование спутниковой линии связи между городом Якутск и поселком Черский
Стремительное развитие космонавтики, успехи в изучении и
исследовании околоземного и межпланетного космического пространства выявили
весьма высокую эффективность использования околоз ...
Проектирование передатчика телевизионной системы на печатной плате
Телевизионный передатчик: совокупность специализированных технических
средств, применяемых в процессе телевещания (кроме источника сигнала и его
тракта, источника электропитания и энерго ...
Проектирование устройства автоматической компенсации доплеровской частоты для СДЦ РЛС 5Н84А
Широкое
применение радиолокационной техники в военных целях (воздушная и наземная
разведки, навигация, вывод на траекторию ракет различного назначения) вызвало в
последние годы бурное р ...