- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Документированные погрешности элементов
Погрешности датчика Холла:
приведенная погрешность ± 0,5%
основная погрешность ±0,1%
темп. коэффициент нестабильности напряжения 0,003%/10 °C.
Погрешности встроенного в МК АЦП:
интегральная нелинейность ±0,05%;
дифференциальная нелинейность ±0,040%;
погрешность смещения нуля (калибруется) ±0,050%;
погрешность диаметра (калибруется) ±0,090%;
погрешность резистора R ±0,1%
Заключение
В данной работе были рассмотрены и изучены приборы и измерения скорости.
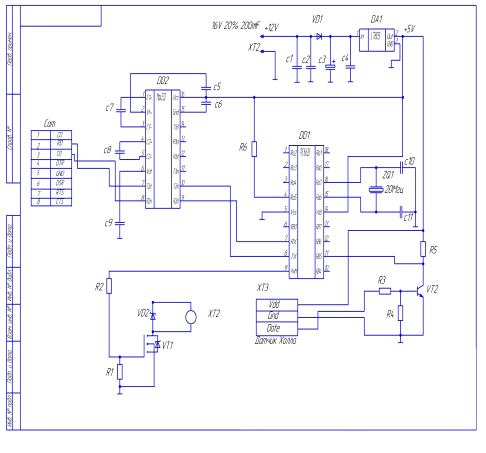
Было разработано устройство измерения скорости Это устройство предназначено для измерения скорости и расчета силы ветра и отображения на цифровом табло её текущего значения.
Устройство реализовано на однокристальном микроконтроллере типа PIC16F628.
Применение в устройстве данного однокристального микроконтроллера привело к возможности оперативно меняя программу работы в широких пределах корректировать алгоритм обработки данных.
Устройство имеет следующие характеристики:
Потребляемая мощность не более 0,4 Вт;
Наработка на отказ около 30000 часов;
Как одно из возможных улучшений можно предложить для увеличения быстродействия использовать другой МК PIC18XXX.
Приложения
. Электрическая схема
Читайте также
Проектирование центра обслуживания вызовов
Целью
настоящей курсовой работы является получение знаний о принципах
функционирования современных центров обслуживания вызовов (ЦОВ) и навыков их
проектирования с применением известных ...
Модернизация охранной сигнализации университета
Безопасность собственного имущества издревле была одной из
главных забот человека. Для защиты от несанкционированного вторжения в жилище,
хищения вещей и пожара человечество придумало не ...
Проект цифрового фильтра
В
последнее время методы цифровой обработки сигналов (ЦОС) в радиотехнике,
системах связи, управления и контроля приобрели большую важность и в
значительной мере заменяют классические а ...