- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Математическая модель переходного процесса в обмотке двигателя
Для обеспечения работы двигателя в номинальном режиме необходимо чтобы его вращающий момент был постоянным. При увеличении частоты питающего напряжения, а следовательно и скорости вращения двигателя, его реактивная составляющая сопротивления обмотки возрастает, тем самым токопотребление уменьшается и уменьшается вращающий момент. При некоторой повышенной частоте питания двигатель перестаёт работать даже при холостой нагрузке. Для того чтобы этого избежать необходимо поддерживать постоянным вращающий момент пропорциональный коэффициенту отношения напряжения питания к частоте. Этого можно добиться регулируя время работы ключевого каскада управления двигателем. Таким образом нам необходимо поддерживать постоянным ток потребления двигателя.
Чтобы обеспечить режим постоянного токопотребления, необходимо промоделировать переходной процесс в обмотке двигателя. Тем самым мы получим значения моментов включения и выключения ключевых транзисторов.
Рассчитаем составляющие сопротивления обмотки исходя из следующих данных:
напряжение питания 230В
частота источника питания 50Гц
ток потребления 0,5А
cosφ =0,52
Как известно из курса электротехники, треугольник сопротивлений, он же треугольник напряжений, имеет вид представленный на рисунке 1.
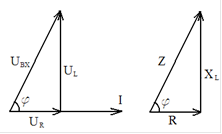
рис. 1
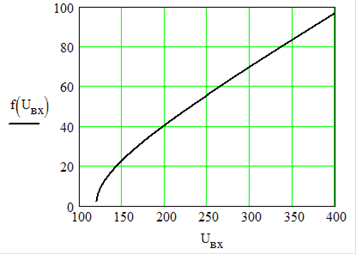
рис. 2.
Из графика видно, что при частоте 80Гц необходимо иметь напряжение питания не ниже 340В.
Схема по которой работает двигатель:
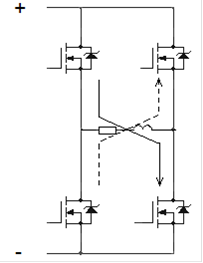
рис. 3
Сплошной линией показан путь прохождения тока при открытых ключах (ток протекает по открытым каналам транзисторов), пунктирной - путь прохождения тока при закрытых ключах (ток протекает по обратно включённым диодам).
Из схемы видно, что при закрытых транзисторах моста имеет место расход энергии ,накопленной обмоткой двигателя, без участия внешнего источника.
Таким образом получили формулу описывающую переходной процесс протекающий в обмотке двигателя при переключении транзисторных ключей:
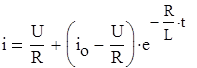
где io - ток в начальный момент времени.
Проведём аппроксимирование синусоидальной функции полученной зависимостью. Для более жёстких условий возьмём синус с частотой 80Гц.
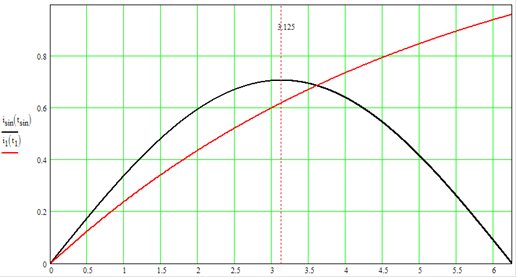
рис. 4
Из графика видно, что напряжения питания недостаточно для быстрого совершения переходного процесса, поэтому мы не сможем аппроксимировать данную синусоиду. Необходимо увеличить напряжение питания до 450В.
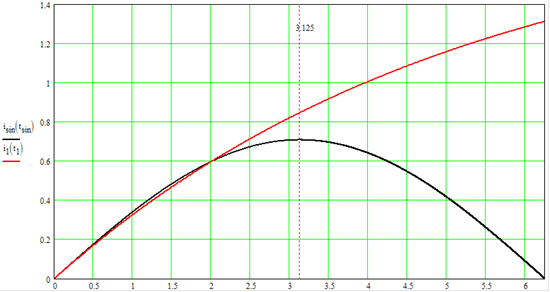
рис. 5
Теперь можно провести с некоторой погрешностью аппроксимацию, включая и выключая в нужные моменты транзисторы.
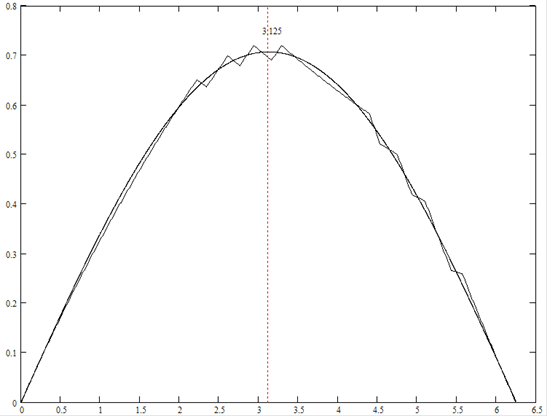
рис. 6
Так выглядит аппроксимированная синусоида с погрешностью 2,3% от Imax
Проделав тоже и для остальных частот с шагом в 5Гц получим таблицу временных интервалов, которую в дальнейшем запрограммируем в микроконтроллер.
Таким образом мы получили новые условия для разработки модуля управления:
напряжение питания ключевого моста Uп = 450В
ток потребления нагрузки Iп = 0,5А
трехфазный асинхронный двигатель управление
Читайте также
Нанотехнологии в науке и технике
В течение тысячелетий человек использовал в быту и технике
макроскопические тела, состоящие из большого числа атомов, будь это каменный
топор или авиалайнер. Первая научно- ...
Перспективы развития транкинговой радиосвязи
Системы
транкинговой радиосвязи, представляющие собой радиальнозоновые системы
подвижной УКВ радиосвязи, осуществляющие автоматической распределение каналов
связи ретрансляторов между а ...
Проектирование системы управления вентильным преобразователем
Вентильные преобразователи широко применяются для преобразования энергии,
вырабатываемой и передаваемой в виде переменного напряжения промышленной
частоты 50Гц в электрическую энергию др ...