- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Описание метода пространственной фильтрации
В данном методе используется антенна, которая в одном фиксированном положении производит передачу сигнала к объекту, принимает отраженный сигнал, а затем перемещается по оси, параллельной стене, где в следующем положении измерения повторяются (см. рис. 5).
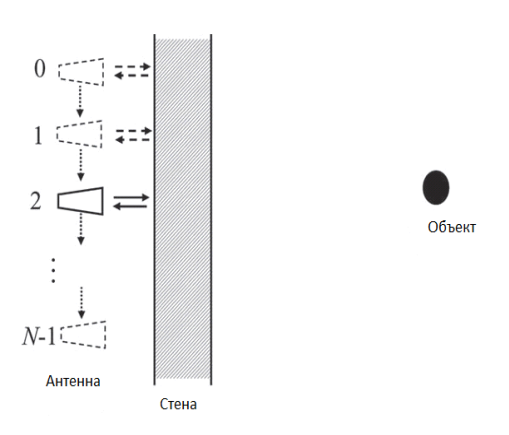
Рис. 5. Расположение антенн
Предположим, что имеется N положений антенны. Для P точечных целей, сигнал, принятый на n-ой антенне, после отражения от объекта, находится из выражения
радиоголографический фильтр преломление стена
 (2)
(2)
где ![]() - передаваемый сигнал,
- передаваемый сигнал, ![]() - коэффициент отражения p-ой цели,
- коэффициент отражения p-ой цели, ![]() - время прохождения сигнала туда и обратно между n-ой антенной и p-ой целью. Если стена отсутствует, то время задержки может быть найдено по формуле [3]:
- время прохождения сигнала туда и обратно между n-ой антенной и p-ой целью. Если стена отсутствует, то время задержки может быть найдено по формуле [3]:
 (3)
(3)
где ![]() - скорость распространения волн,
- скорость распространения волн, ![]() и
и ![]() - координаты
- координаты
p-ой цели и n-ой антенны, соответственно. На радиоголограмме (k,l)-пикселю соответствует значение [3]:
 (4)
(4)
Если антенна расположена таким образом, что сигнал распространяется перпендикулярно стене, то значительная часть может отразиться назад от самой стены. Если поглощающая способность стены высока, а сигнал имеет недостаточную мощность, то большая часть сигнала будет отражена обратно, и цель не будет зафиксирована.
Если полученный сигнал можно представить в виде суперпозиции двух сигналов, от стены и от объекта, то для лучшего результата можно провести вычитание фона по некоторому алгоритму. Полученный сигнал можно представить в виде [3]
![]() (5)
(5)
где ![]() - сигнал, отраженный от стены,
- сигнал, отраженный от стены, ![]() - время прохождения сигнала туда и обратно между стеной и антенной,
- время прохождения сигнала туда и обратно между стеной и антенной, ![]() - время прохождения сигнала туда и обратно между объектом и текущим положением антенны.
- время прохождения сигнала туда и обратно между объектом и текущим положением антенны.
Задержка между стеной и антенной постоянна, а между объектом и антенной - меняется, в зависимости от положения антенны. При ![]() , и
, и ![]() получим выражение [3]:
получим выражение [3]:
![]() (6)
(6)
для n=0,…,N-1. Если зафиксировать время t, то сигнал - функция n по переменной ![]() . Тогда мы можем переписать (2) в виде [3]:
. Тогда мы можем переписать (2) в виде [3]:
![]() , (7)
, (7)
где ![]() и
и ![]() .
.
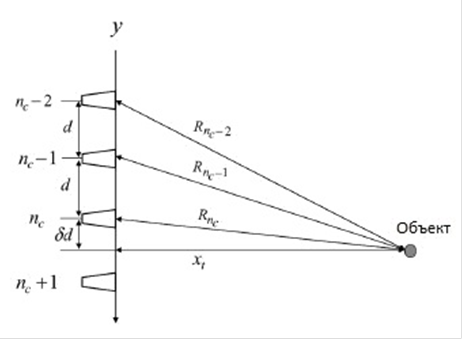
Рис. 6. Расстояния от антенн до объекта
На рис. 6 показано расположение цели и антенн. Предположим, что ![]() находится ближе к цели. Если рассеяние на стене пренебрежимо мало, то
находится ближе к цели. Если рассеяние на стене пренебрежимо мало, то
 (8)
(8)
В большинстве случаев расстояние до цели ![]() много больше расстояния d между антеннами. Тогда
много больше расстояния d между антеннами. Тогда ![]() . Используя разложение в ряд Тейлора, мы можем аппроксимировать (3) как
. Используя разложение в ряд Тейлора, мы можем аппроксимировать (3) как
 (9)
(9)
Тогда
 (10)
(10)
Полученный сигнал при ![]() можно записать в виде
можно записать в виде
 (11)
(11)
для n=0,…,N-1 и ![]() .
.
Читайте также
Одномодовые оптические волокна
В одномодовых оптических волокнах (SM ОВ) диаметр сердцевины соизмерим с длиной волны, и за счет
этого в нем существует только одна основная направляемая мода LP01.
Рис. 1. Р ...
Приемно-контрольная панель на базе микроконтроллера
Приемно-контрольные
приборы (ПКП) осуществляют прием информации от извещателей, ее запоминание,
обработку и передачу соответствующим службам, а также выполняют процедуры
взятия под охра ...
Проектирование системы управления вентильным преобразователем
Вентильные преобразователи широко применяются для преобразования энергии,
вырабатываемой и передаваемой в виде переменного напряжения промышленной
частоты 50Гц в электрическую энергию др ...