- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Пассивные корректирующие средства
Между регулятором (Р) и исполнительным устройством (ИУ), выходное и входное сопротивления которых равны соответственно RИ и RН, включено последовательное пассивное корректирующее средство (КС).
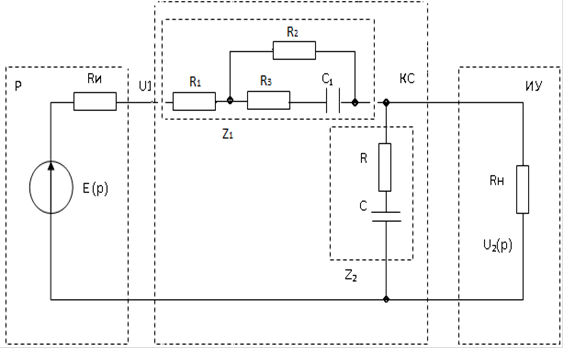
Рисунок 1 - Схема включения пассивного КС по варианту 29
Требуется:
а) получить передаточную функцию КС для трех случаев: с учетом Ru и Rн, при Ru = 0, при Rн= ![]() ;
;
б) построить асимптотические логарифмические амплитудно-частотную (ЛАЧХ) и фазочастотную (ЛФЧХ) характеристики КС для указанных случаев;
Решение

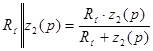
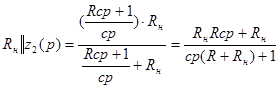
Искомые передаточные функции КС следуют из следующего выражения: где
Найдем значения комплексных сопротивлений:

![]()
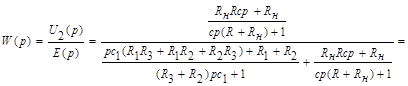
а) получаем передаточную функцию КС W(p) для трех случаев: с учетом Ru и Rн , при Ru = 0, при Rн = ![]() ;
;
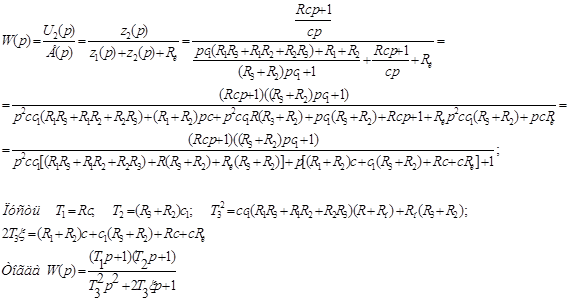
с учетом Ru и Rн:
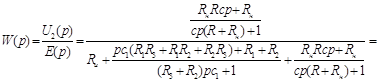
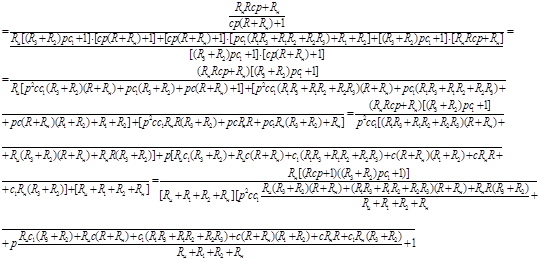
![]()
Из полученной функции видно, что передаточная функция представляет собой 4 звена - 1 колебательное, 1 усилительное и 2 форсирующих звена [2].
при Ru = 0

Передаточная функция при Ru = 0 содержит в себе 4 звена: 1 колебательное, 1 усилительное и 2 форсирующих звена [2].
при Rн = ![]() :
:
Полученная передаточная функция при Rн = ![]() содержит в себе звенья: 1 усилительное и 2 форсирующих звена [2].
содержит в себе звенья: 1 усилительное и 2 форсирующих звена [2].
б) построим асимптотические логарифмические амплитудно-частотную (ЛАЧХ) и фазочастотную (ЛФЧХ) характеристики КС
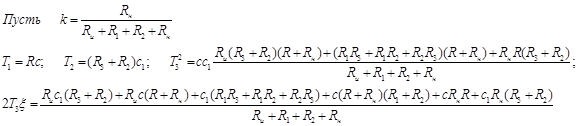
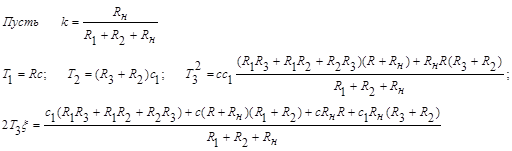
Пусть для 1 случая (с учетом Ru и Rн): Т1>T2>T3
Рисунок 2 - ЛАЧХ И ЛФЧХ КС с учетом Ru и Rн
Пусть для 2 случая (Ru = 0): Т1>T3>T2
Рисунок 3 - ЛАЧХ И ЛФЧХ КС при Ru =0
Пусть для 3 случая (Rн = ![]() ): Т3>T1>T2
): Т3>T1>T2
Рисунок 4 - ЛАЧХ И ЛФЧХ КС при Rн = ![]()
Заключение
В данной расчетно-графической работе были получены навыки использования пассивных RC-устройств для улучшения качества процесса управления в налаживаемых системах автоматического управления (САУ).
Были получены передаточные функции КС для трех случаев:
1. с учетом Ru и Rн - ![]()
. при Ru = 0 - ![]()
. при Rн= ![]() -
- ![]()
Для каждого из этих случаев были построены асимптотические логарифмические амплитудо-частотные (ЛАЧХ) и фазочастотные (ЛФЧХ) характеристики КС.
Исходя из полученных передаточных функций можно сделать вывод, что Ru и Rн не влияют на структуру передаточной функции, но влияют на значения постоянных времени Т1, Т2, Т3 и коэффициента k, что отражается на полученных графиках ЛАЧХ и ЛФЧХ.
управление автоматический сопротивление амплитудный
Читайте также
Подвеска оптического кабеля на опорах
В
настоящее время на ВОЛП-ВЛ применяются следующие типы ОК:
ОКГТ
- оптический кабель, встроенный в грозозащитный трос;
ОКСН
- оптический кабель самонесущий;
ОКНН
- оптический ...
Программно-аппаратный комплекс, позволяющий проводить эксперименты по одновременному управлению несколькими мобильными объектами
В настоящее время в области искусственного интеллекта (ИИ) происходят
заметные преобразования. Источниками этих преобразований служат распределенный
искусственный интеллект (РИИ), центра ...
Оптоэлектронные технологии
Оптоэлектроника
- бурно развивающаяся область науки и техники. Многие ее достижения вошли в
быт: индикаторы, дисплеи, лазерные видеопроигрыватели. Разрабатывается
твердоте ...