- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Определение устойчивости нелинейной системы


Гармонически линеаризованная передаточная функция нелинейного звена, согласно приложению, равна:
![]()
при a ≥ b2.
-Z(a) = 3.82(![]() )
)
Z(a) = - ![]()
![]() (a) =
(a) = ![]()
![]()
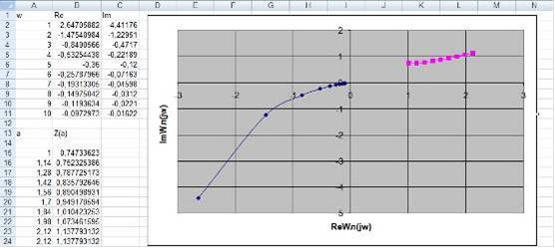
Рисунок 11.
Из рисунка 11 следует, что годографы не пересекаются в одной точке, что свидетельствует об отсутствии в системе автоколебаний и ее устойчивости.
Задача 9. Исследовать устойчивость состояния равновесия нелинейной системы (рис. 12). Параметры линейной части системы: Т1=NВ с, Т2=NВ-2,5 с, Т3=NВ·1,1 с, k1= NВ /10, k2=NВ·2. Для статической характеристики нелинейного звена: b=1, k3=NВ, где NВ - номер варианта.
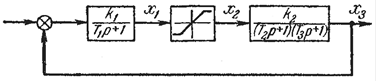
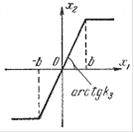
Рисунок 12.
Исходные данные:
Т1=Nв=26с;
Т2=Nв-2,5=6-2,5=3,5с;
Т3=Nв*1,1=6*1,1=6,6с;1= Nв/10=6/10=0,6;2= Nв*2=6*2=12;
b=1;3= NВ=6.
Решение
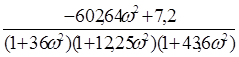
Амплитудно-фазовая характеристика линейной части:

Умножаем на комплексно-сопряженные числа:





Разделяем вещественную и мнимую части:


Гармонически линеаризованная передаточная функция нелинейного звена, согласно приложению, равна:
 при a>=b.
при a>=b.
Z(a) = ![]()
Z(a) = ![]()
![]()
Получаем объединенный график годографов линейной и нелинейной частей:
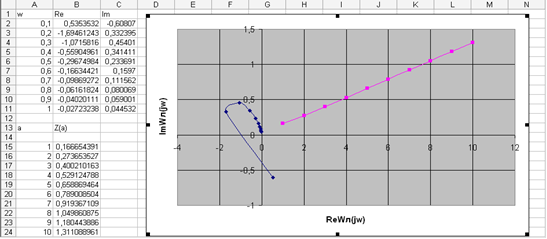
Рисунок 13.
Из рисунка 13 следует, что годографы не пересекаются в одной точке, что свидетельствует об отсутствии в системе автоколебаний и ее устойчивости.
дифференциальный уравнение устойчивость нелинейный
Читайте также
Организация связи по оптическому кабелю магистрали Коченево-Мамонтово
Телекоммуникации
являются основой развития общества. Постоянно растущий спрос, как на обычные
телефонные, так и на новые виды услуг связи, включая услуги Интернет,
предъявляет новые тре ...
Разработка макета для исследования металлических проводниковых материалов
Автоматизация
производства процесс в развитии машинного производства, при котором часть или
весь комплекс операций по качественному преобразованию состояния исходного
сырья, управлению ...
Проектирование и разработка интернет-магазина Компьютерная техника
Разработка
сайтов для компаний является актуальной и востребованной сферой деятельности,
т.к. сайт фирмы в сети Интернет представляет собой достаточно дешевый и
массовый способ рекл ...