- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Определение устойчивости нелинейной системы
Задача 1. Составить нелинейные дифференциальные уравнения следящей системы (рисунок 1)
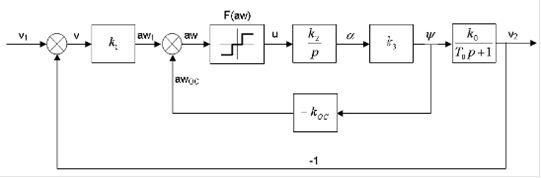
Рис. 1. Структурная схема следящей системы.
Исходные данные:
Т0=Nв/10=6/10=0,6;
k1=Nв=6;
k2=Nв*2=6*2=12;
k3=Nв/2=6/2=3
k0=Nв*1,5=6*1,5=9;
koc=Nв*2,5=6*2,5=15.
Решение
Уравнение чувствительного элемента:
aw1=k1*v;
v=v1-v2;
aw1=k1*(v1-v2)
Уравнение релейного усилителя:
u=F(aw); при koc = 0=aw1-awoc
Уравнение линейного усилителя:
αp=k2u;
Уравнение исполнительного механизма:
φ=k3*α
Уравнение редуктора:
(T0p+1)*v2=k0*φ
Уравнение обратной связи (тахогенератор):
awoc=koc*φ
Выражаем относительно выходной переменной aw:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() =
= ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Задача 2. Построить фазовый портрет системы
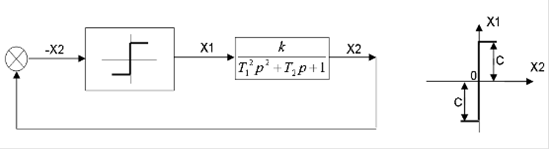
Рисунок 2.
Данные:
Т12=Nвар/10=6/10=0,6с;
Т2= Nвар/2=6/2=3с;
k= Nвар=6;
с=2.
Уравнения замкнутой нелинейной системы:
![]() при х2>0 (1)
при х2>0 (1)
![]() при х2<0 (2)
при х2<0 (2)
Заменяем: x2 = x
(0,62p2 + 3p +1) * x = -6 * 2
(0,36р2 + 3р + 1) * x = -12
Заменяем:
p = ![]()
![]()
(![]()
![]() +1) x = -12
+1) x = -12
Заменяем:
![]()
![]() ;
; ![]()
![]() .
.
ydy + 3y + x = -12 => 0,36 ![]()
![]() + 3y + x = -12
+ 3y + x = -12
Переносим x на правую сторону:
![]()
![]() + 3y = -12 - x
+ 3y = -12 - x
Переносим dy на правую сторону:
dx = ![]()
![]()
Интегрируем:
x = ![]()
![]() ln (- 3 - 12 - x) + C1
ln (- 3 - 12 - x) + C1
x = ![]()
![]() ln (- 3 + 12 - x) + C2
ln (- 3 + 12 - x) + C2
Упрощаем:
Читайте также
Проектирование и разработка интернет-магазина Компьютерная техника
Разработка
сайтов для компаний является актуальной и востребованной сферой деятельности,
т.к. сайт фирмы в сети Интернет представляет собой достаточно дешевый и
массовый способ рекл ...
Разработка компьютерных аналогов схем исследования биполярных транзисторов
компьютерный программа полупроводниковый моделирование
В
данной работе исследуются возможности применения компьютерного моделирования
для изучения характеристик традиционных полупроводник ...
Проектирование радиовещательного приемника
Теория и техника радиоприемника быстро совершенствуется. Это требует от
специалистов постоянного изучения современной техники. Развитие радиоприемной
аппаратуры характеризуется в осн ...