- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Программное корректирующее устройство
В разрабатываемой системе присутствует микропроцессор, с помощью которого можно реализовать коррекцию. В зависимости от способа включения микро-ЭВМ различают последовательную и параллельную коррекцию, в данном случае используется последовательная коррекция.
Последовательная коррекция с помощью управляющей программы служит для непосредственного преобразования сигнала рассогласования.
Для того чтобы реализовать программу коррекции необходимо представить передаточную функцию корректирующего устройства в виде разностных уравнений в реальном масштабе времени. Для этого необходимо произвести обратное z-преобразование.
Подставляя в выражение передаточной функции корректирующего устройства
 (71)
(71)
выражение
 (72)
(72)
Получим
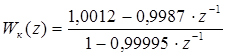 . (73)
. (73)
Найдем разностное уравнение в реальном масштабе времени, то есть введя в числитель дополнительный сдвиг z-1. В результате этого получим
![]() , (74)
, (74)
где x и y - соответственно входной и выходной сигнал, k - шаг квантования.
Блок схема для реализации функции программной коррекции представлена на рисунке 18.
реактивная бомбометная привод управление
Рисунок 18 - Блок - схема корректирующей программы.
Читайте также
Монтаж и регулировка шестиканальной цветомузыкальной приставки
Основным направлением развития радиоэлектронной
промышленности является создание высокотехнологической радиоэлектронной
аппаратуры на основе четкой организации производства, использован ...
Моделирование радиомаячной системы посадки метрового диапазона с помощью программы Micro-Cap
Функциональные возможности использования авиации во многом
определяются качеством решения задач навигации, в частности, уровнем развития
устройств и систем радионавигации.
Под термино ...
Оборудование станции Круговец линейным комплектом ДЦ Неман
На современном этапе развития железнодорожного транспорта все более
значимую роль занимают системы с применением микропроцессорной техники. В
настоящее время разрабатываются и вводятся в ...