- Главная
- Компьютерные сети и технологии
- Микропроцессорные системы
- Цифровые устройства
- Оптоволоконные системы
Предварительная компоновка
Для реализации мобильного робота нам необходимы следующая элементная база:
· Аккумуляторы (4 шт.);
· Два двигателя постоянного тока;
· Два редуктора;
· Блок управления(представляет собой электронную плату);
· Тумблер включения/выключения питания МР.
Соединение колес с редуктором предусматривается через ременную передачу.
Рассмотрим несколько вариантов компоновки элементов на роботе.
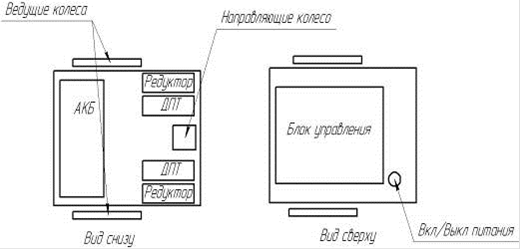
В представленной компоновки аккумуляторные батареи располагаются снизу робота в два ряда, также там располагается двигатели и редуктора. Блок управления и переключатель питания находится сверху.
Достоинства:
§ небольшой размер,
§ высокая посадка,
§ большой диаметр колес.
Недостатки: так как батареи уложены в два ряда, необходимо устанавливать колеса большого диаметра, вследствие этого конструкция мобильного робота становиться высокой, что влияет на устойчивость мобильного робота. При задании большой скорости мобильный робот может опрокинуться назад.
Вариант компоновки № 2
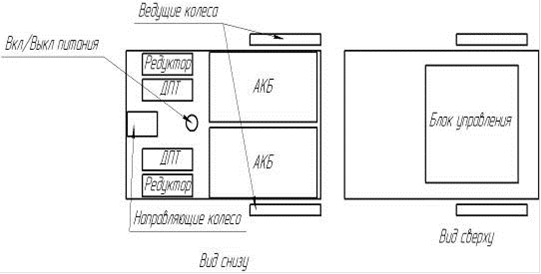
Проанализировав первый вариант компоновки и учитывая, как недостаток высокую посадку мобильного робота рассмотрим второй вариант компоновки.
В данной компоновки редуктора, ДПТ, аккумуляторные батареи располагаются снизу МР. Сверху находится блок управления. При расположении аккумуляторных батарей в один ряд получаем конструкцию низкую по высоте и устойчивую.
Так как блок управления находиться сверху можно легко получить доступ электроники МР. Ключ включения/выключения располагается снизу МР, что удобно так как сверху на робот будет крепиться крышка.
Читайте также
Пример записи фильма в формате DVCAM
звуковой формат
Цель данной работы показать работу в условиях записи фильма в формате
Dvcam, записи зистового звука на HD-рекордер. Были выбраны 2 рассказа А.П.
Чехова: "Кот" и ...
Разработка комплекта электрических схем маршрутной релейной централизации блочного типа
Целью дипломного проектирование являлась разработка комплекта
электрических схем маршрутной релейной централизации блочного типа (БМРЦ) для
использования их студентами техникума в качест ...
Организация системы контроля доступа и видеонаблюдения в учреждении образования
Система
контроля доступа - это совокупность программно-технических средств и чётко
сформированной системы управления движением персонала и временем его нахождения
на объекте. Основными ...